 Skip to content
Skip to content
Опити за автоматично, без участие на човек, управление на движещи се машини се правят отдавна. Те могат да се класифицират в следните групи: индукционни, фотоелектрически, електрохидравлически и програмиращи.
ИНДУКЦИОННИЯТ МЕТОД е използван още през 1918 г. за ориентация на кораби при влизане в пристанище по време на мъгла. По дъното на морето се поставя кабел, по който се пуска променлив ток с ниска честота. Чрез подходяща апаратура корабът се насочва към пристанището.
В САЩ се правят опити за използването на този метод в автомобилния транспорт, но голямата скорост на автомобилите и гъстотата на превозните средства по пътищата затрудняват използването му.
През 1958 г. в Радинския институт Англия е изпитан трактор с автоматично управление по начина представен на блок-схемата (фиг.1).
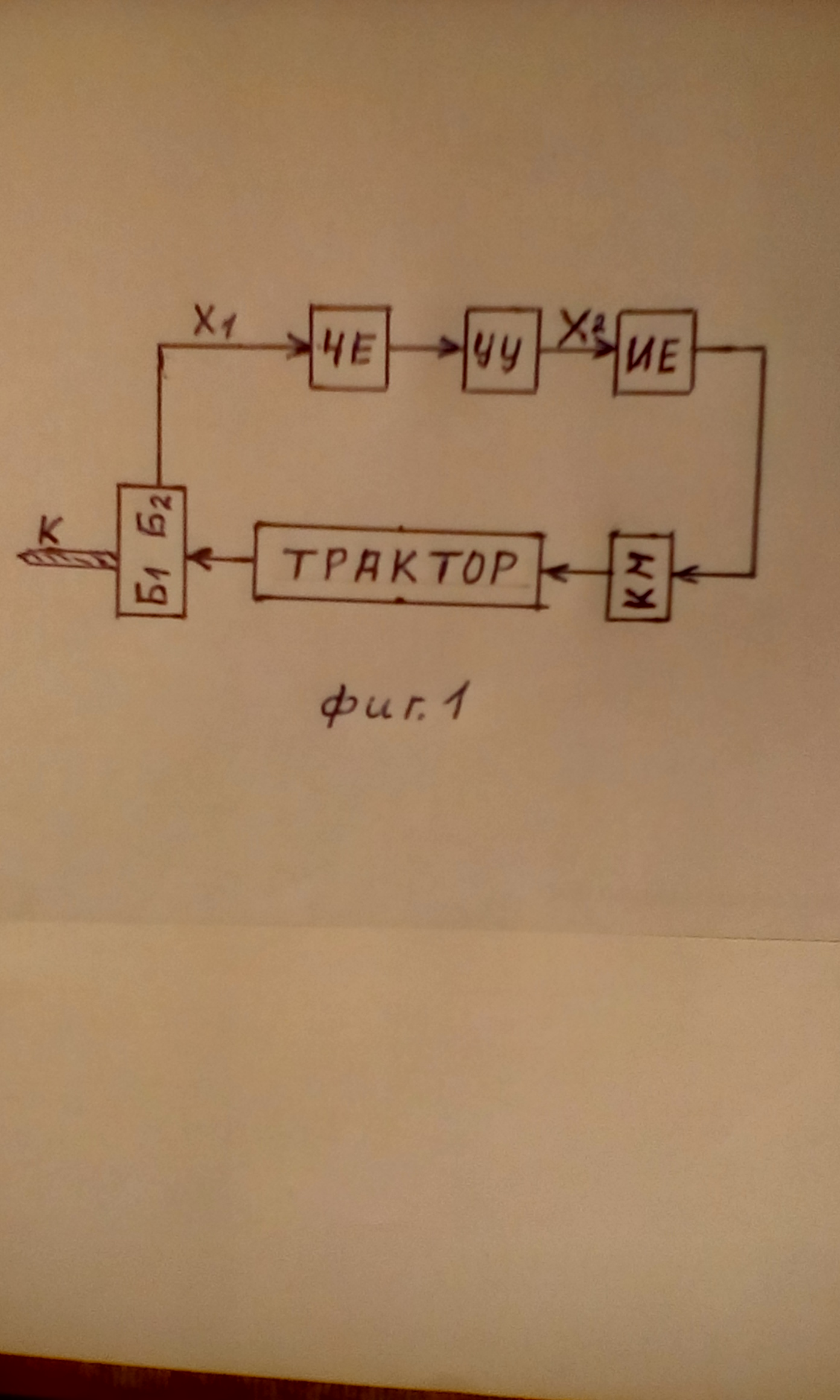
Кръговото магнитно поле на кабела К, поставен под земята, се пресича от двете бобини Б1 и Б2, монтирани на рама хоризонтално пред трактора. При съвпадение на траекторията на движението на трактора с трасирания кабел, в бобините се индуцират еднакви силови линии и системата е неутрална. При отклонение на трактора едната бобина се приближава към кабела, а другата се отдалечава и възниква сигнал за несъответствие Х1. Този сигнал се приема от чувствителния елемент ЧЕ, усилва се в усилвателното устройство УУ и усиленият сигнал Х2 постъпва в изпълнителния елемент ИЕ. Това е електрохидравличен сервопривод, който действа на кормилния механизъм КМ. Тракторът завива докато в бобините се индуцират еднакви силови линии и изчезне сигналът за несъответствие.
ФОТОЕЛЕКТРИЧЕСКИЯТ МЕТОД е разработван за управление на жетварки, сенокосачки и комбайни. Сигналът за водене на машината по границата на неорязаната култура се изработва от два фотоелемента, монтирани пред работния орган. Единият фотоелемент е разположен над несрязаната култура, а другият близо до земята над ожънатата площ. Ако положението на фотоелементите спрямо несрязаната култура се промени, възниква напрежение между електродите на една електрическа лампа. Протича ток през едно реле, който задейства сервопривода на кормилното управление и системата се връща в неутрално положение.
В бившия Съветски съюз е разработена друга фотоелектрическа система с два фотоелемента, монтирани вертикално върху машината и един източник на инфрачервени лъчи, поставен върху жалон на земята пред машината по трасето на канала. Предназначена е за автоматично изработване на канали с предварително зададен наклон – блок схема (фиг. 2).
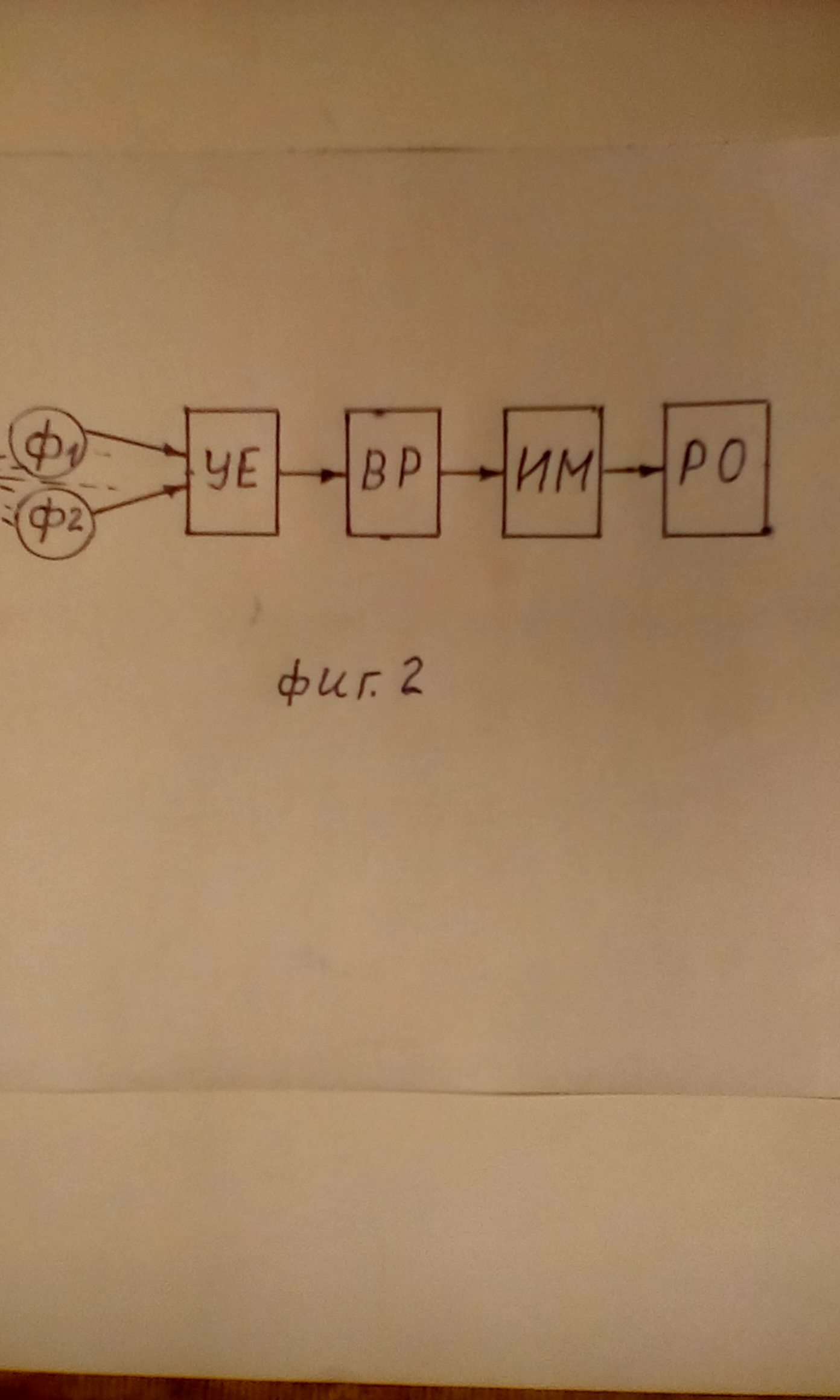
При движение по неравното поле фото елементите Ф1 и Ф2 се изместват спрямо светлинния лъч и осветеността на единия елемент се намалява, а на другия се увеличава. Възниква сигнал за несъответствие, който след усилване в елемента УЕ задейства релето ВР. То включва изпълнителния механизъм ИМ за регулиране положението на работните органи на каналокопателя.
ЕЛЕКТРОХИДРАВЛИЧНИЯТ МЕТОД за управление на трактори в земеделието използва лост, монтиран в предната част на трактора, който се плъзга по вертикалната стена на отворената бразда при оран или по стеблата и коловете при трайни насаждения. През 1960 г. като студент във ВИМЕСС /РУСЕНСКИ УНИВЕРСИТЕТ/ разработих и защитих дипломна работа на тема: „Автоматично управление на трактор Т-28“. Конструирах и изработих Електрохидравлично устройство по блок схемата (фиг. 3), което беше демонстрирано при защитата и получи отлична оценка.
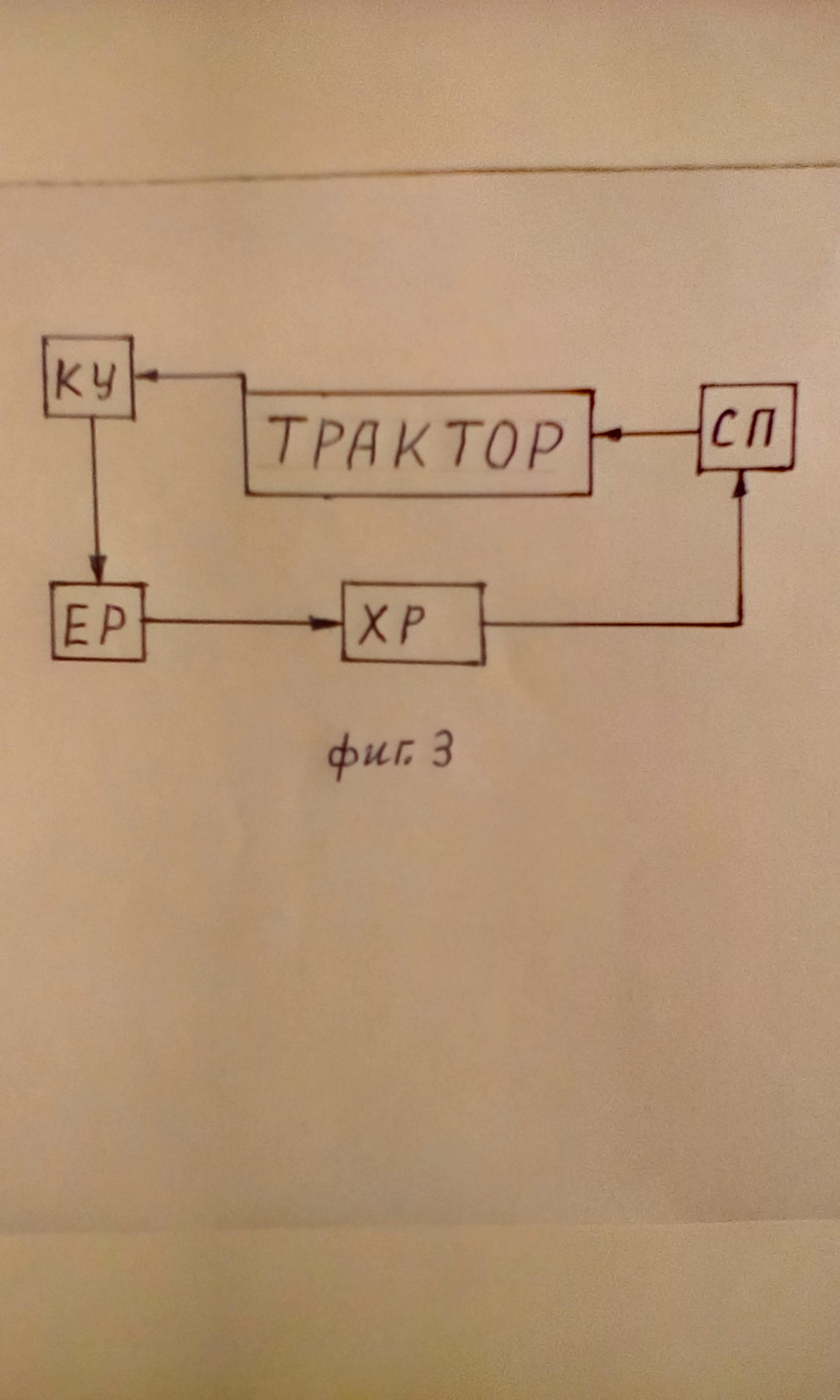
Копиращото устройство КУ съдържа електрически контакт, който се включва когато копиращият лост допре до стената на бразда, стебло, или кол. Електрическият ток от трактора включва релето ЕР, което отваря хидравличния разпределител ХР. От хидравличната система на трактора постъпва масло под налягане и се задейства сервопривода СП за отклоняване на трактора. Когато копиращият лост не се допира до отклоняващи предмети, устройството е в неутрално положение и тракторът поддържа правата линия.
Подобно устройство беше изработено от колегите в секция „Трактори“ в Държавен изпитателен център Пловдив. Колесен трактор, снабден с това устройство обикаля с десен или ляв завой около окръжност. Тя е изработена от стоманен профил, монтиран върху крака над повърхността на площадката. Тракторът може да се движи автоматично по цял ден. Спира се от персонала само за зареждане и измерване на показателите, необходими за изпитването.
ПРОГРАМНИЯТ МЕТОД използва изкуствен интелект за програмиране движението на мобилните машини и за контролиране на технологичните процеси на работите машини. Разработват се сложни програмирани системи, а допълнителната GSM навигационна система, свързана с кормилната уредба и безстепенната предавателна кутия на трактора дават възможност за автоматизиране на работните процеси в земеделието.
Немската компания ZF е разработила процесор ZF ProAI, който обработва данните от сензори, датчици и камери разположени по работните органи, като използва технология за анализиране и програмиране на технологичните процеси.
Австрийската компания LINDNER е разработила нова система за работа в лозя. Лазер сканира лозите, а тракторът автоматично поддържа линията на редовете. Предлагат се три режима на работа: ориентация вдясно, вляво, или централно, в зависимост от прикачния инвентар.
Предотвратява се увреждането на лозите, улесняват се завоите, сигнализира се за наличието на препятствия и трактористът може да съсредоточи вниманието си само върху показанията на уредите за изпълнението на технологичния процес.
Доц. д-р инж. Тодор Хаджиев